На МКС появится «Андронавт»

Российские ученые финишируют с работой по созданию первого отечественного робота-помощника для работы на Международной космической станции.
Антропоморфная робототехническая система «Андронавт» была представлена в рамках XI Международной научно-практической конференции «Пилотируемые полеты в космос», которая открылась 10 ноября в Центре подготовки космонавтов им. Ю.А. Гагарина в Звездном городке.

Назвали робота "Андронавт". Его рост 1 м 90 см, он широкоплечий — красавец-мужчина ("Мужчина"! Феминистки уже стонут). Его особенность в том, что он антропоморфный, то есть по своей структуре, строению напоминает человека. И в этом его огромное преимущество.

Разработчики: специалисты Центра подготовки космонавтов имени Гагарина и отраслевого института ФГУП «ЦНИИмаш», а также космонавты «Роскосмоса».
«Появление робота-помощника на МКС, с одной стороны, разгрузит деятельность космонавта, а с другой — может усложнить систему, так как между «профессиональной средой» и космонавтом появится новый участник — робот-помощник. Поэтому в этой области очень важны и необходимы дополнительные эргономические исследования, которые позволят получить дополнительные знания в области изучения системы взаимодействия робота и человека», — сказал руководитель проекта в ЦПК, заместитель начальника научного управления ЦПК Игорь Сохин.

«Андронавт» относится к последней категории робототехнических систем, он может дистанционно управляться оператором. Например, член экипажа из герметичного отсека на лунной базе, облаченный в специальный костюм (экзоскелет), сможет управлять роботом, находящимся на большом удалении на поверхности Луны.
Робот будет выполнять механическую однообразную работу при проведении экспериментов, например, подавать космонавту инструменты.
Управление роботом также можно выполнять с Земли оператором Центра управления полетами. В автоматическом режиме робот-помощник должен обеспечить помощь экипажу при выполнении различных полетных операций, например, подать космонавту необходимый инструмент. «Андронавт», оснащенный многомодальным интерфейсом, способен оказывать и информационную поддержку: оператор может задать вопрос и получить на него ответ с помощью голосового сообщения или прочитать мультимедийный текст на планшете. Кроме информационной «подсказки», прорабатывается вопрос обеспечения «Андронавтом» психологической поддержкой членов экипажа.
Сейчас МКС используется как экспериментальная платформа, отрабатываются новейшие технологии, в частности робототехнические.

Например, установленный на МКС канадский робототехнический комплекс «Канадарм» "работает" по переносу крупных конструкций.

«Грузовая стрела» (ГСт) — грузовой кран для перемещения грузов и космонавтов по внешней поверхности станции. Использовался на советской/российской станции «Мир» и применяется в российском сегменте МКС.
Два крана. Оба были установлены на модуле «Пирс». Первый был доставлен во время полёта STS-96, второй — STS-101. Затем, ввиду скорого окончания срока службы «Пирса», краны были перемещены на поверхность модулей «Поиск» и «Заря» (в 2012 году).

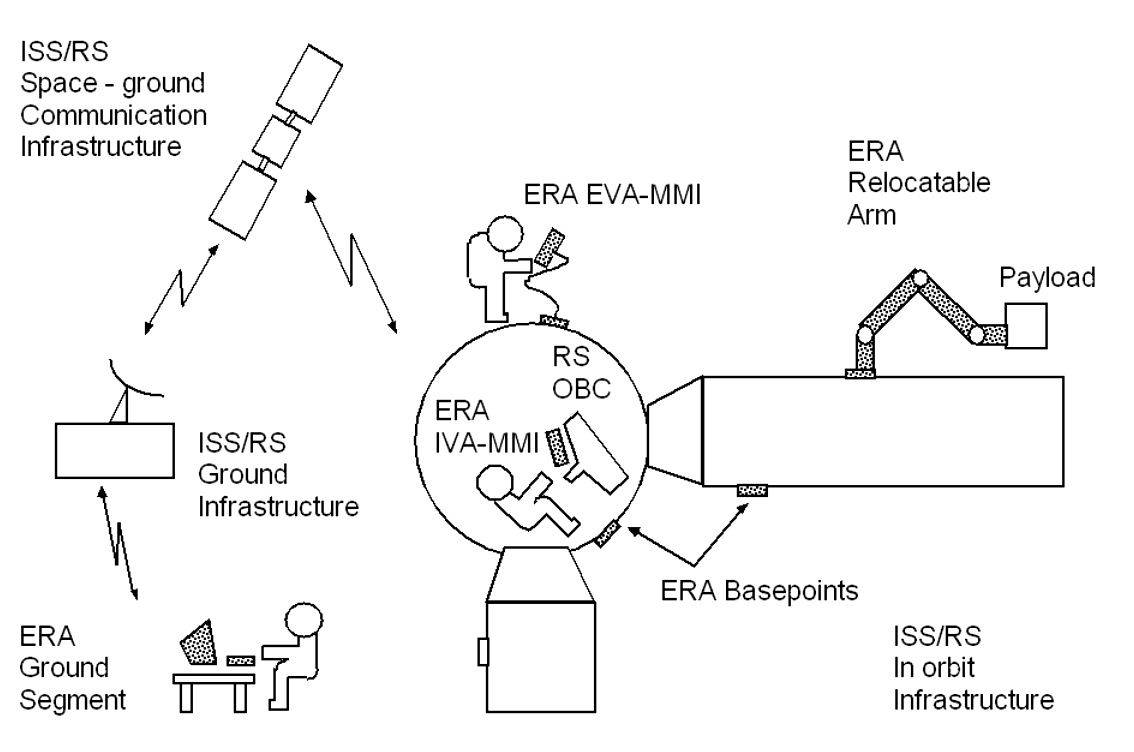
Европейский манипулятор ERA приобрел новое место — многофункциональный лабораторный модуль "Наука", созданный ГКНПЦ имени Хруничева на основе резервного модуля ФГБ-2. На нём будут размещены базовые точки крепления и устройство управления манипулятором.
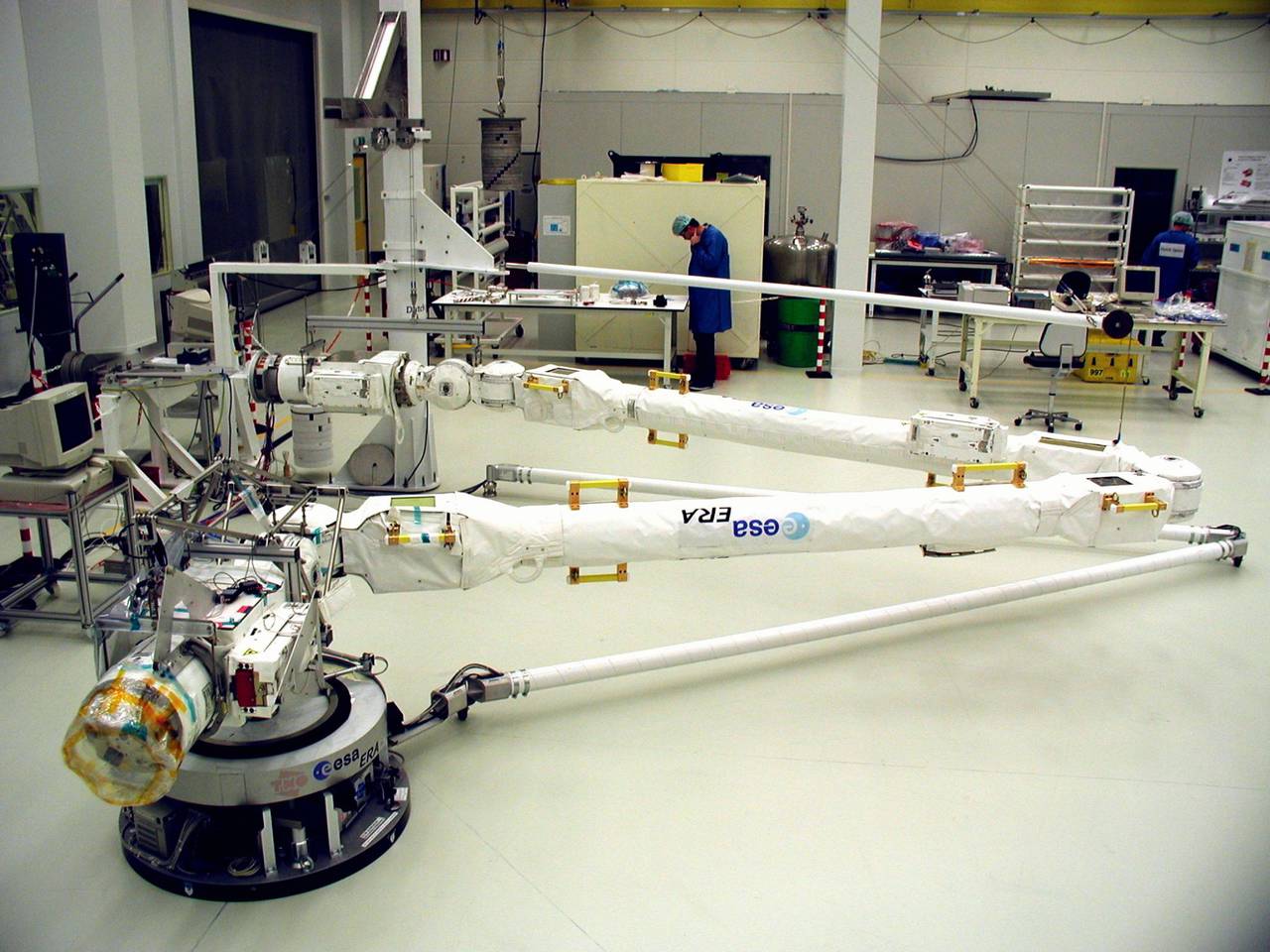
Жаль, что он пока находится на Земле (из-за катастрофы «Колумбии» планы поменялись).
«Robonaut 2» — человекоподобный робот, разработанный NASA и General Motors. Представляет собой безногую человекоподобную фигуру, голова которой выкрашена золотой краской, а торс — белой. На руках у робонавта по пять пальцев с суставами наподобие человеческих. Машина умеет писать, захватывать и складывать предметы, держать тяжёлые вещи, например, гантель весом 9 кг. Робот пока не имеет нижней половины тела. В шлем R2 вмонтированы четыре видеокамеры, благодаря им робот не только ориентируется в пространстве, но и транслирует с них сигналы на мониторы диспетчеров. Также в шлеме находится и инфракрасная камера. Общее число датчиков и сенсоров более 350. Шея робота имеет три степени свободы, а каждая рука, размах которых 244 см — семь. Кисти устройства имеют 12 степеней свободы. Каждый палец выдерживает нагрузку до 2,3 кг. В "животе" робота находится вычислительный центр, в состав которого входят 38 процессоров PowerPC. Конструкционно робот выполнен в основном из алюминия и стали. Масса Robonaut 2 составляет 150 кг, а рост — 1 м. На спине робота размещается рюкзак с энергетической системой.
«Робонавт-2» отправился на МКС 24 февраля 2011 года на борту шаттла STS-133 «Дискавери» и будет работать на станции на постоянной основе.
Цель запуска робота — проверка его функционирования в условиях невесомости, изучение влияния на его работу космического и электромагнитного излучения.
14 апреля 2014 года Американским космическим агентством (NASA) должны быть отправлены ноги для робонавта. Интересно то, что после того как к роботу-гумоноиду подсоединят ноги, его общий рост составит 2,7 метра. Каждая нога робота имеет семь соединений.

Но пока, по моим сведениям, этого (доставки нижних конечностей) не произошло.
Немного из истории отечественных космороботов
"Ляппа" — крупный механический манипулятор, использовавшийся во время сборки советской орбитальной станции «Мир». Манипулятор крепился непосредственно на собираемых модулях станции. Каждый из модулей «Квант-2», «Кристалл», «Спектр» и «Природа» был оборудован одним экземпляром ляппы.

Манипулятор также использовался для изменения положения модулей станции, позволяя разворачивать их на 90°.
SAR-401 от НПО «Андроидная техника».


Принцип управления аватаром: повтор им движений человека-оператора, одетого в специальный костюм (в случае SAR-401 используется задающее устройство копирующего типа УКТ-3).
С 2013 года в земных условиях отрабатываются различные сценарии управления: с борта МКС и аварийный сценарий управления роботом с Земли. Жаль, но это пока что нелетный вариант.
Видео в тему: Top 5 Humanoid Robots of 2015.
Использованы материалы, фотографии и видео:
http://robotrends.ru
http://chrdk.ru
http://trinixy.ru
http://www.gctc.ru/
http://v-kurse.ru/
www.youtube.com
en.wikipedia.org
ru.wikipedia.org
http://robonaut.jsc.nasa.gov/mobility
Информация